 DF
DF
 D
D
화성 탐사 로봇인 큐리오시티는 6일 오후 (우리 시각) 화성 표면에 착륙해 가장 먼저 주변 지역을 촬영해 지구에 전송했다.
큐리오시티가 찍는 첫 화성 지표면의 영상은 위성의 신호 전달에 소요되는 시간 때문에 착륙 2시간이 지나 NASA에 전송됐다. 최초로 촬영되는 영상은 탐사로봇의 앞뒤에 설치된 좌우 2개의 해즈캠(Hazcams)에 의해 촬영된 영상이다. 이 영상은 백만 화소급의 저해상도 영상으로 송신되며 NASA 기술자들은 이 사진을 분석해 첨단 카메라가 장착된 마스트캠(Mastcam,)을 가동해도 안전한지 여부를 판단한다. 즉 NASA 기술자들은 이 영상을 토대로 마스터캠의 가동 여부를 결정하는 큐리오시티의 위치와 기울기, 주변 환경에 대한 정보를 파악하는 것이다.
이 작업에는 수일이 소요되며, 마스트캠이 가동되면 3D 최첨단 카메라로 주변 환경에 대한 조사를 본격적으로 시작한다.
큐리오시티는 도착 직후 해즈캠으로 촬영한 가로 세로 64픽셀 크기의 견본 영상 2개를 성공적으로 보내왔는데 화성표면에 착륙한 후 촬영해 보낸 첫 영상이다.
 D
D
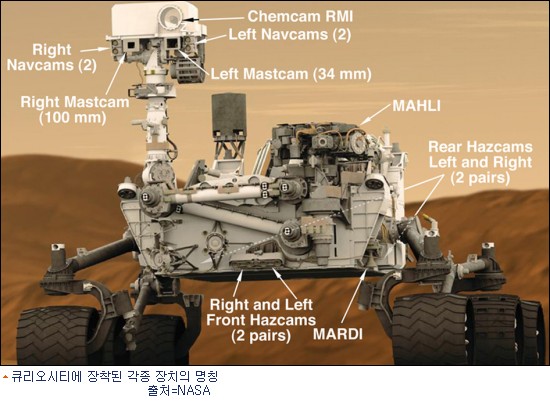
큐리오시티는 앞뒤에 8개의 해즈캠(Hazcams)이 장착돼 있으며 윗면에는 나브캠(Navcams)으로 불리는 4개의 운행 카메라가 외부 관측 마스터에 탑재돼 있다. 이들 카메라는 모두 흑백이며 좌우 입체로 설치돼 3차원 입체 영상을 제공한다. 12개 카메라 가운데 절반은 고장에 대비한 예비용이다.
또 큐리오시티에 장착된 MARDI(Mars Descent Imager)카메라로부터 착륙 때 얻은 사진들은 로봇의 위치를 정확히 파악하는데 매우 유용한데 최초의 사진들이 7일 공개될 것으로 예상된다. 이 사진들도 가로 192픽셀 세로 144픽셀 이하의 작은 크기로 보내지며, 한 장의 고해상도 사진도 전송될 예정이다.
화성표면에 대한 칼라 사진은 MAHLI(Mars Hand Lens Imager)에 의해 촬영된 것으로 8일 밤쯤 수신될 것으로 보인다. MAHLI는 큐리오시티의 탐사용 로봇팔에 부착된 5개의 장치 가운데 하나로 바위나 토양에 대한 근접 사진을 촬영하기 위한 것이다. 그러나 MAHLI는 착륙 시 몸체에 접혀진 상태로 착륙 지점인 게일 크레이트 지역의 전경을 촬영하도록 설정돼 있다.
큐리오시트의 상부에 마스트가 펴지면 나브캠은 주변 360도를 돌며 백만화소의 입체 사진을 찍는다. 이 카메라는 45도 정도의 시야각을 갖고 있으며 25미터 떨어진 곳의 골프공을 식별할 수 있는 해상도를 갖는다. 나브캠은 수직과 수평으로 돌며 비교적 빠른 속도로 주변 풍경을 촬영하도록 디자인됐다. 네비게이션 카메라가 촬영한 사진은 계획대로 진행되면 착륙 3일 후에 수신할 수 있을 것으로 예상된다.
 W
W
해즈캠과 같이 나브캠 사진도 화성 표면의 3차원 입체 정보를 얻기 위해 사용된다. 과학자들은 이 정보를 토대로 큐리오시티를 어떻게, 어디로 운전해서 어떤 암석을 분석해야 할지 결정하게 된다.
[BestNocut_R]착륙 3일 후에 좁은 시야각의 마스트캠(마스터 카메라)이 촬영을 시작한다. 이 두 개의 백만 화소 컬러 카메라는 큐리오시티 주변 지형을 정밀하게 파악할 수 있게 해준다. 한주 정도가 지나면 이 고해상도의 사진을 수신할 수 있다.
[YouTube 영상보기] [무료 구독하기] [nocutV 바로가기] [Podcast 다운로드]